
NASA is planning a mission to look for life on Jupiter’s moon Europa and has created a rover that will be able to navigate its icy surface from above and below.
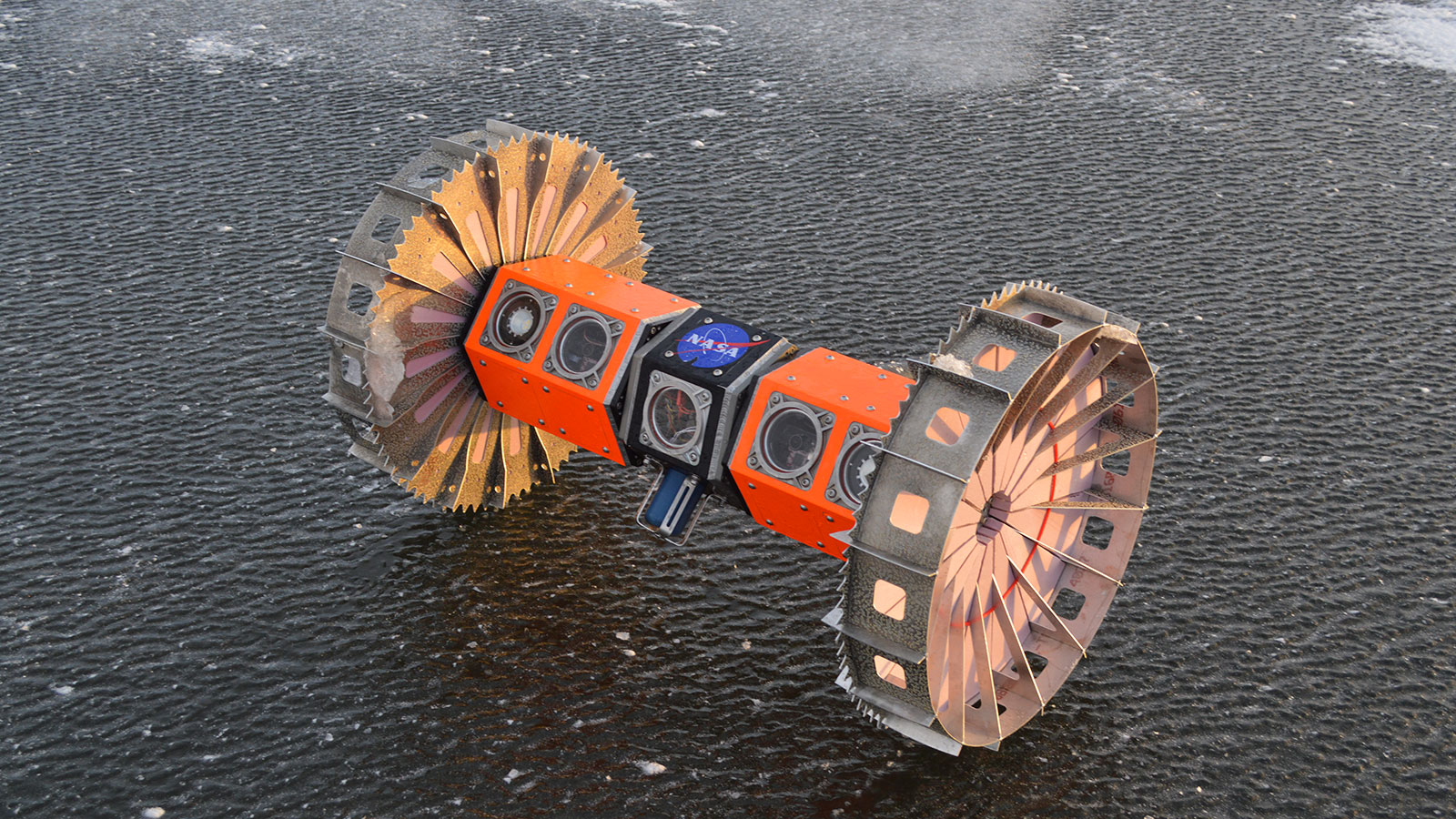
That’s how BRUIE — the Buoyant Rover for Under-Ice Exploration — was born. A nimble and buoyant robot, BRUIE can traverse sheets of ice by anchoring itself to the surface with spiked clamps. It is also waterproof and can roll upside down in water beneath the ice.
NASA wants to explore Europa and other extraterrestrial ice moons to see if there are any current traces of life, which would most likely dwell in the water close to the ice.
“The ice shells covering these distant oceans serve as a window into the oceans below, and the chemistry of the ice could help feed life within those oceans. Here on Earth, the ice covering our polar oceans serves a similar role, and our team is particularly interested in what is happening where the water meets the ice,” said Kevin Hand, JPL lead scientist on the BRUIE project.
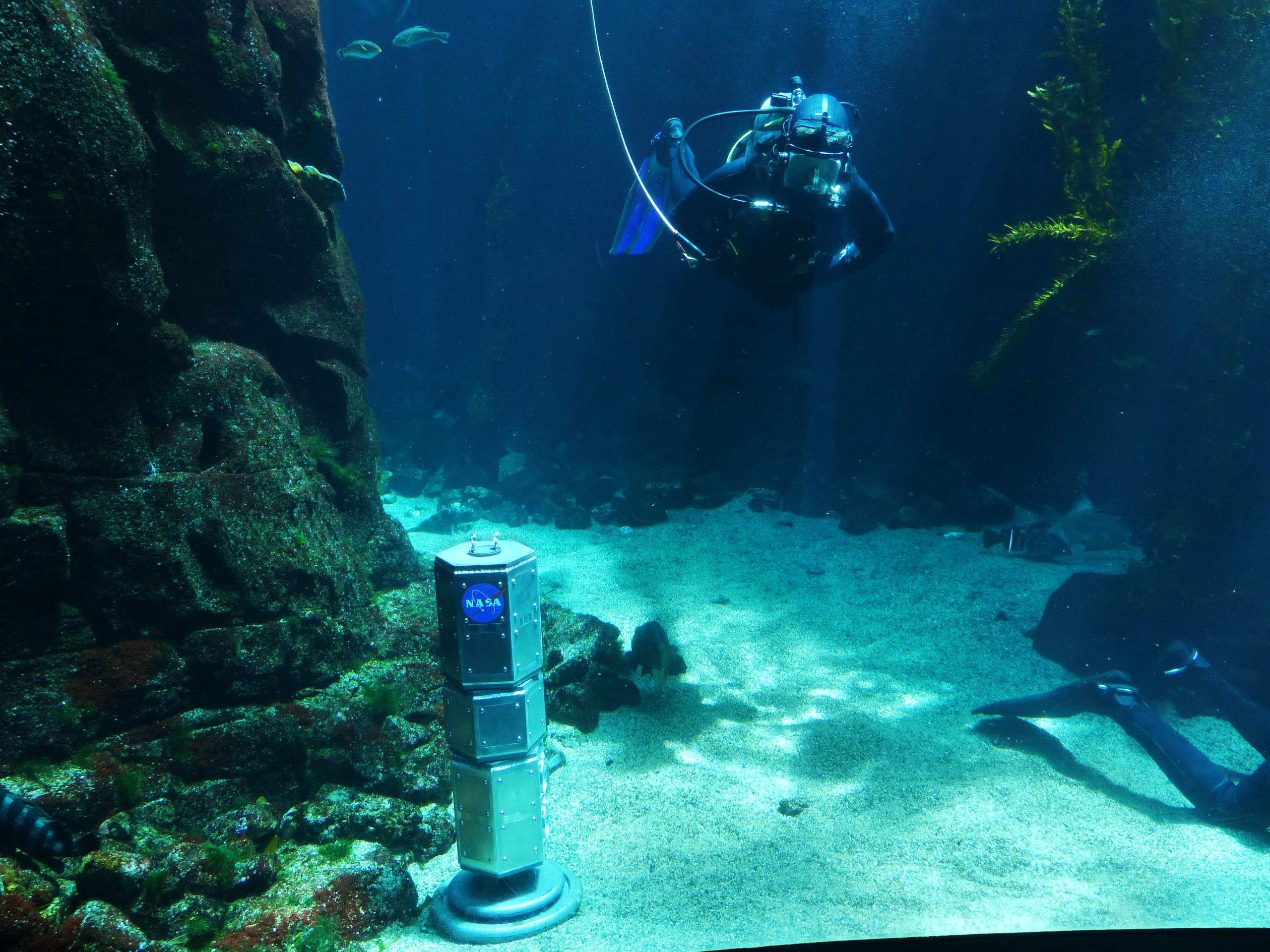
With this in mind, BRUIE is equipped with high-definition cameras to spend long periods of time observing what happens in the space between the dense ice and water.
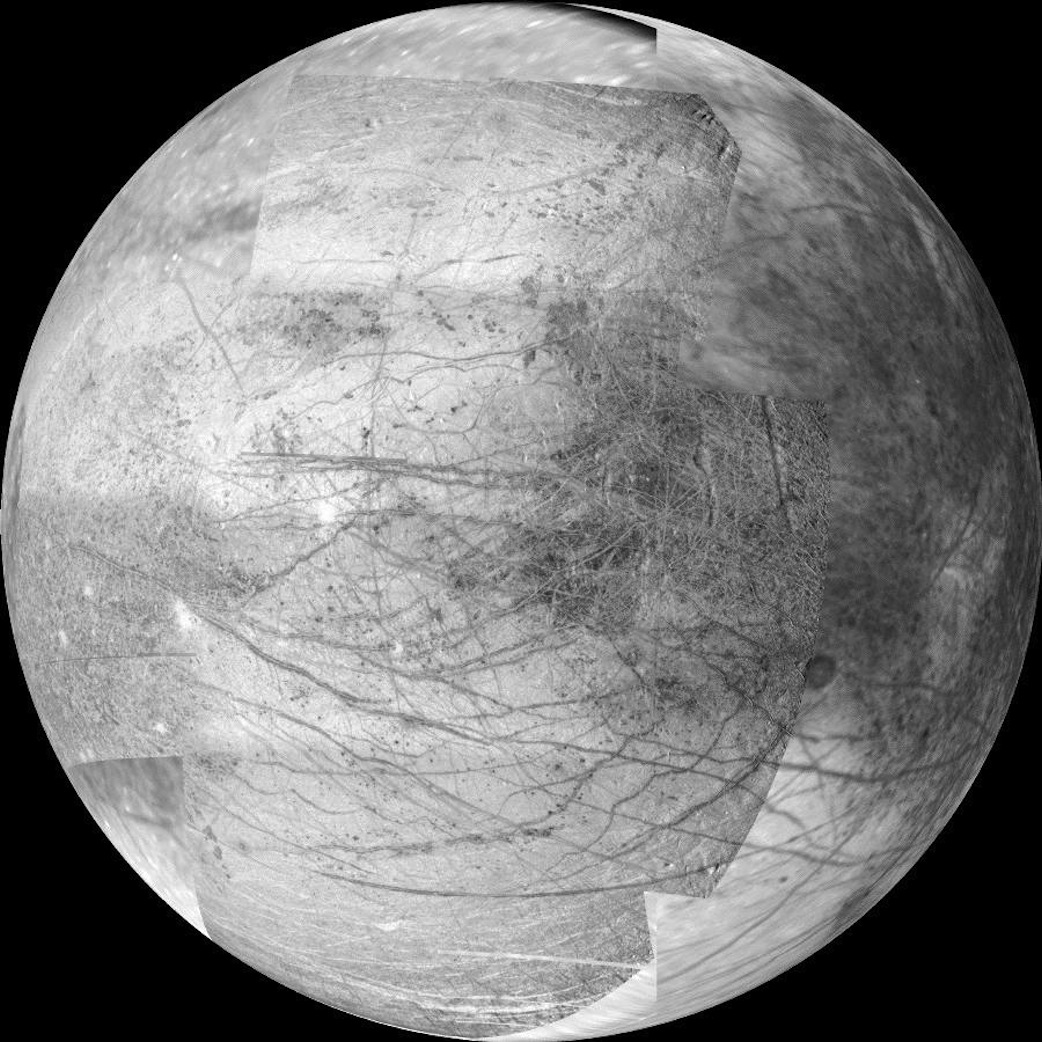
Europa is the smallest of Jupiter’s four Galilean moons — those discovered by the astronomer Galileo Galilei in 1609 — and is roughly the size of the Earth’s moon. It’s also much colder — scientists estimate that the surface temperature of Europa averages around 162 below zero Celsius.
In November, BRUIE trained on sheet ice in Antarctica in conditions similar to those anticipated on Europa. Engineers will continue testing BRUIE’s endurance in freezing temperatures before finally sending the robot along with NASA’s Europa Clipper orbiter. The mission is set to launch no later than 2025.
The Antarctic waters are the closest Earth analog to the seas of an icy moon, which makes them an ideal testing ground for BRUIE technology. Three feet (1 meter) long and equipped with two wheels to roll along beneath the ice, the buoyant rover can take images and collect data on the important region where water and ice meet, what scientists call the “ice-water interface.”
“We’ve found that life often lives at interfaces, both the sea bottom and the ice-water interface at the top. Most submersibles have a challenging time investigating this area, as ocean currents might cause them to crash, or they would waste too much power maintaining position,” said lead engineer Andy Klesh. “BRUIE, however, uses buoyancy to remain anchored against the ice and is impervious to most currents. In addition, it can safely power down, turning on only when it needs to take a measurement, so that it can spend months observing the under-ice environment.”
While the team has previously tested BRUIE in Alaska and the Arctic, this was the rover’s first trial in Antarctica. The team will continue to work on BRUIE until it can survive under the ice for months at a time, remotely navigate without a tether and explore the ocean at greater depths.


{kind=link}